Tolerance-induced error estimation in the Jansen Mechanism
A research project at Manipal Institute of Technology, Manipal
During my Undergraduate studies at the Manipal Institute of Technology, I worked on a mathematical modeling research project under Dr. Ankur Jaiswal (Associate Professor, Mechatronics Department). The project dealt with the Jansen mechanism, a closed kinematic chain that is often used to emulate animal-like gait in robots.
Following is a video by the popular science channel, Veritasium, explaining the origin and development of a machine based on the Jansen Linkage invented by Theo Jansen in 1991.

The project focused on the error estimation in a Jansen mechanism via mathematical modeling in MATLAB, induced due to manufacturing tolerances in the revolute (knuckle joints) between the links. We took into consideration the probability function of the position of the "pin" inside the "eye", for various hole-shaft tolerances (sliding and clearance fits)

The knuckle joints in consideration can be visualized in the following way: the "pin" has a radial clearance with respect to the "eye" and can be within a probability distribution confined within a circular boundary. This boundary is created by noting the extreme points of the pin in the eye and plotting a circle through those points. With a tighter tolerance (H7-g6 etc.), the position function circle's diameter is smaller compared to a loose fit (H11, g6, etc.).

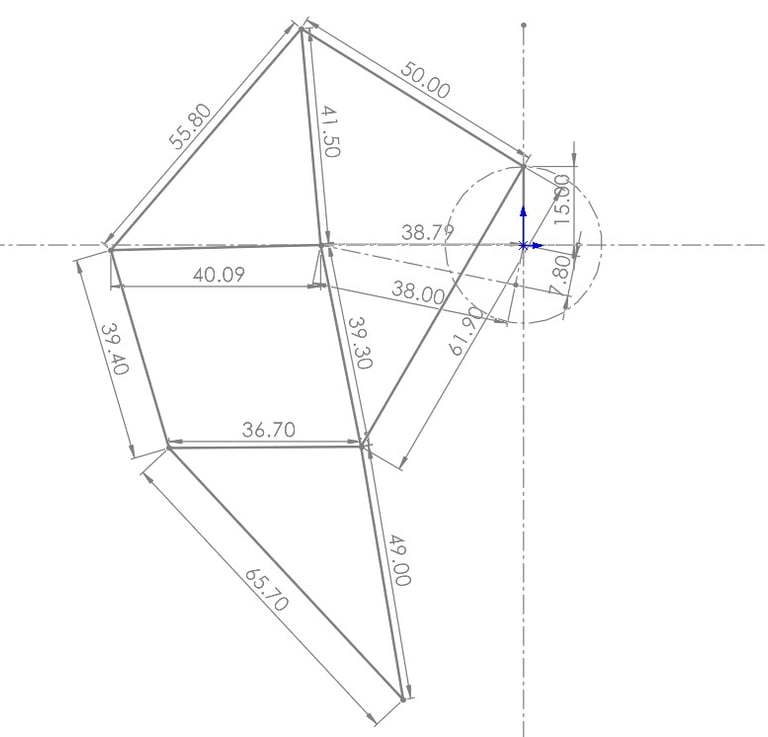
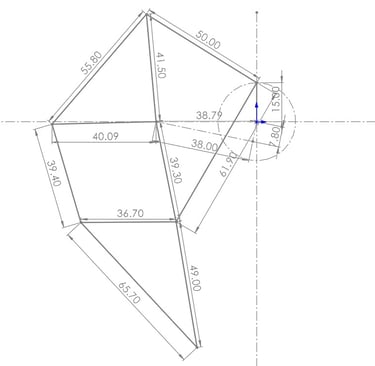
The Mechanism's kinematics were prototyped in a CAD sketch, to achieve an output motion path that requires the majority of the joints in the mechanism to have a large range of motion. This increased the probability of the pin going through multiple positions inside the position function circle.

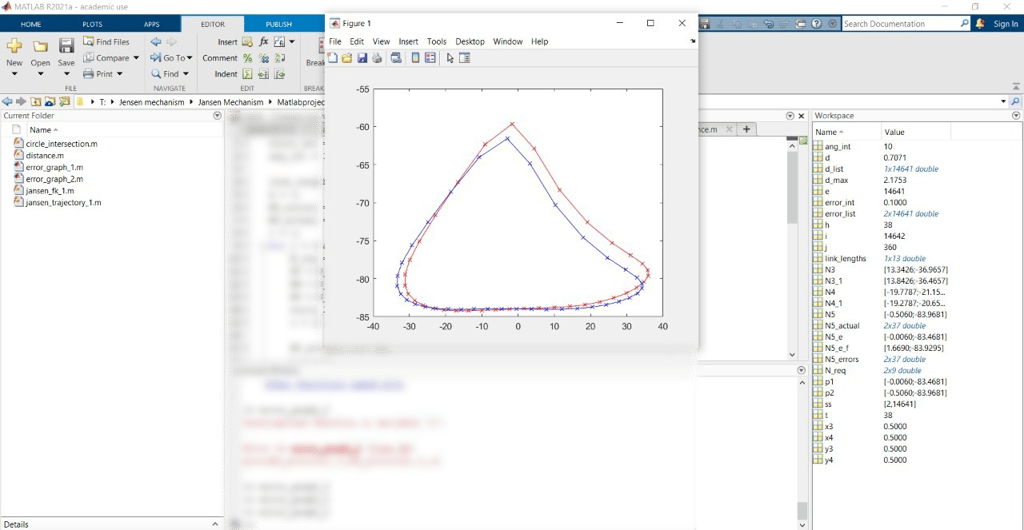
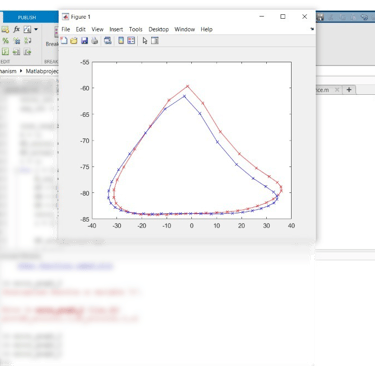
Forward Kinematics was implemented in the mechanism to obtain the output link's trajectory in terms of the input crank's angle. The Forward kinematics loop had a function that randomized the positions of the pin within the eye at every joint, according to the tolerance chosen. The results obtained depict the worst case of errors caused due to H11-g6 tolerances within a Jansen Mechanism.
This work will be continued in the future, utilizing the Machine learning (ML) toolbox in MATLAB, to optimize the joint clearances for each joint, to predict and minimize the error.