Robot Ankle Exoskeleton
At Robotics Institute, Carnegie Mellon University, Pittsburgh

As my capstone project for my Masters in Robotic Systems Development at Carnegie Mellon University, along with four other teammates, I designed, prototyped, tested and bench marked a 1-DoF robotic ankle exoskeleton which assists healthy individuals to walk farther and with lesser effort (reduced metabolic cost).
It can be deployed in jobs where walking on foot is a substantial part of the day, such as Police officials, Store keeping staff at big supermarkets and people who commute to work by walking. Following is a teaser video showing the journey of the development (as of May 2026).







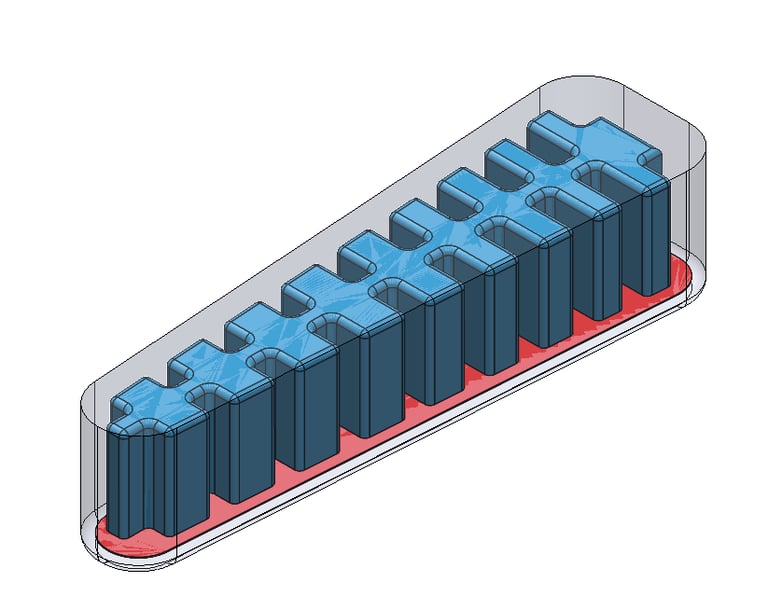
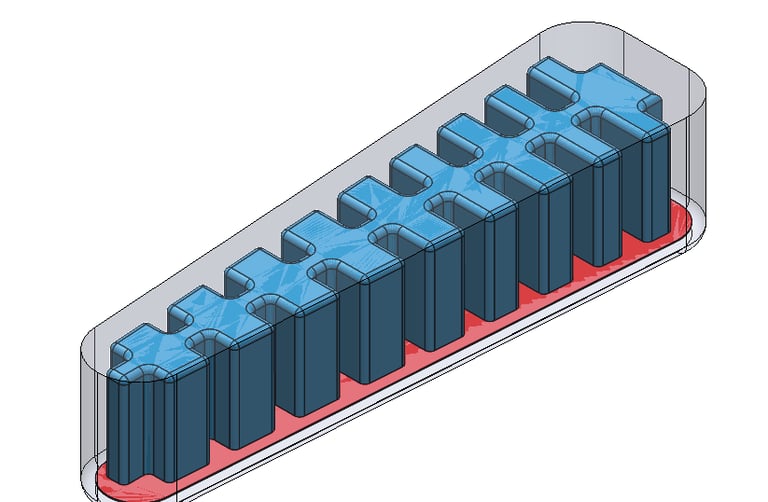
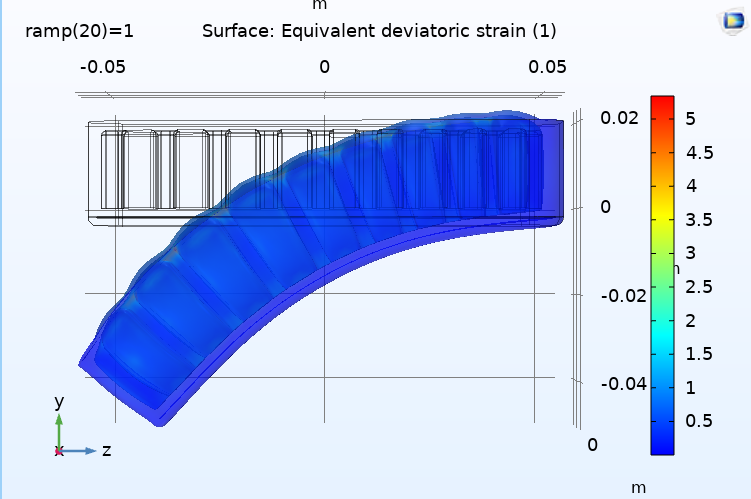
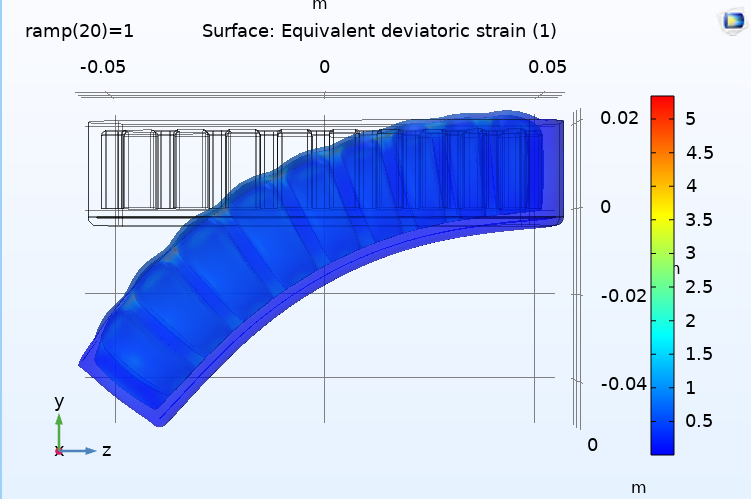
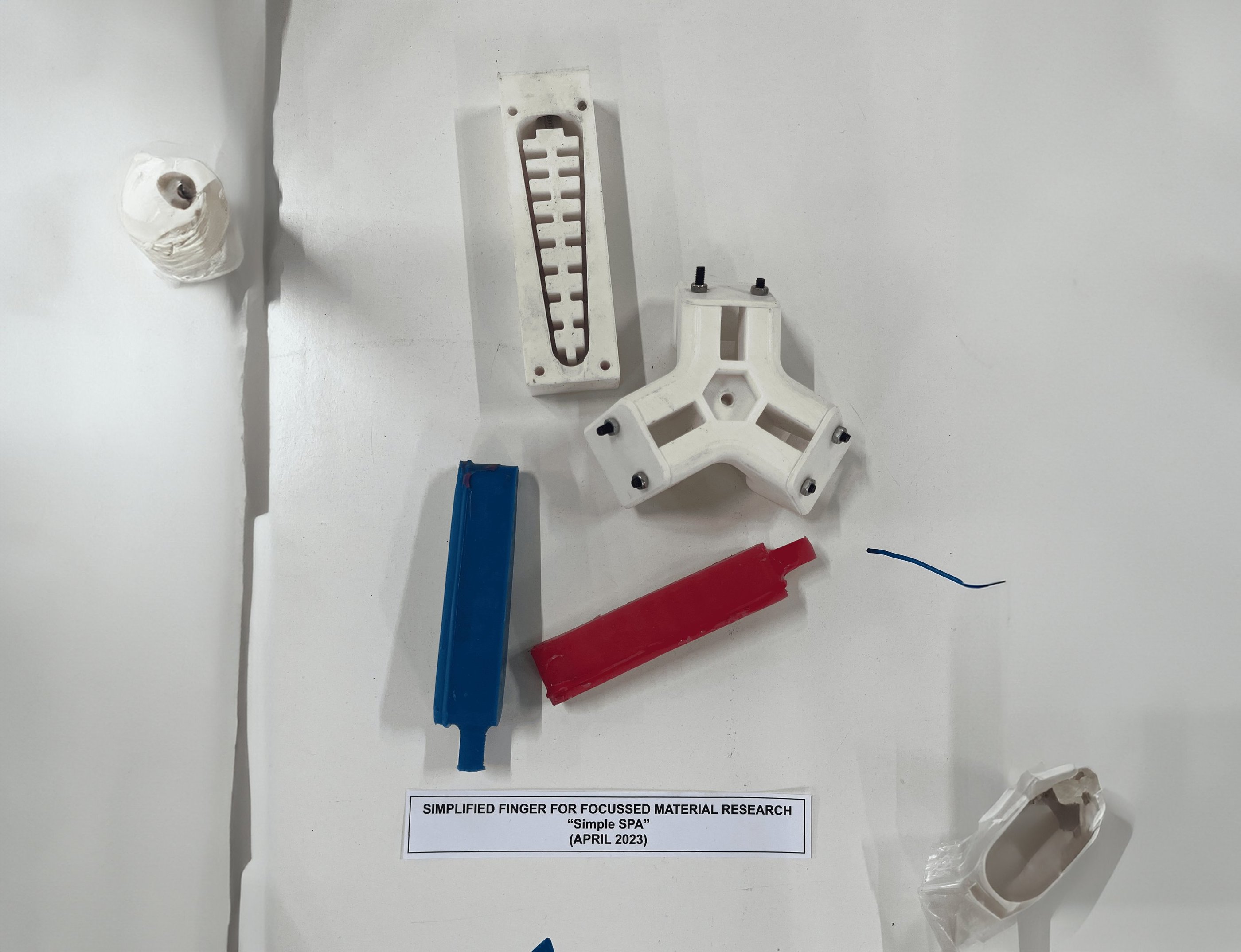
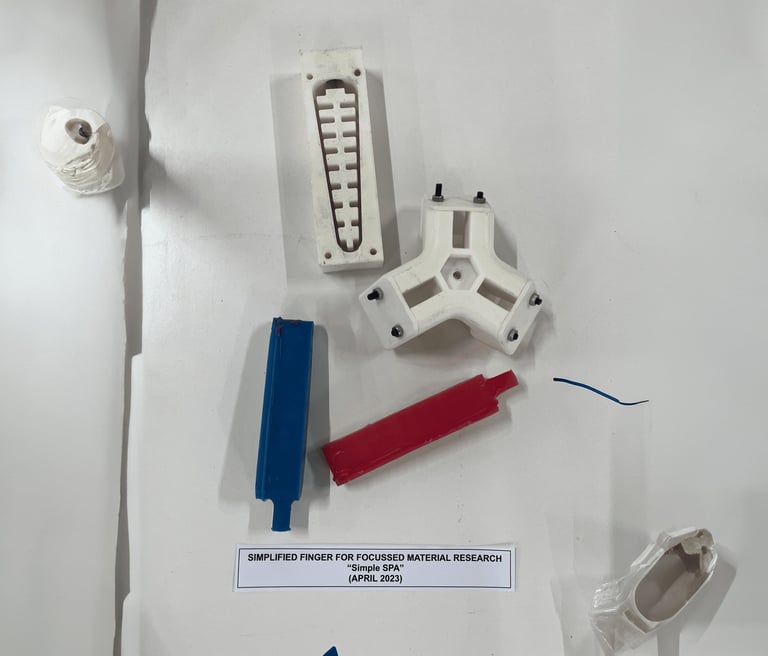
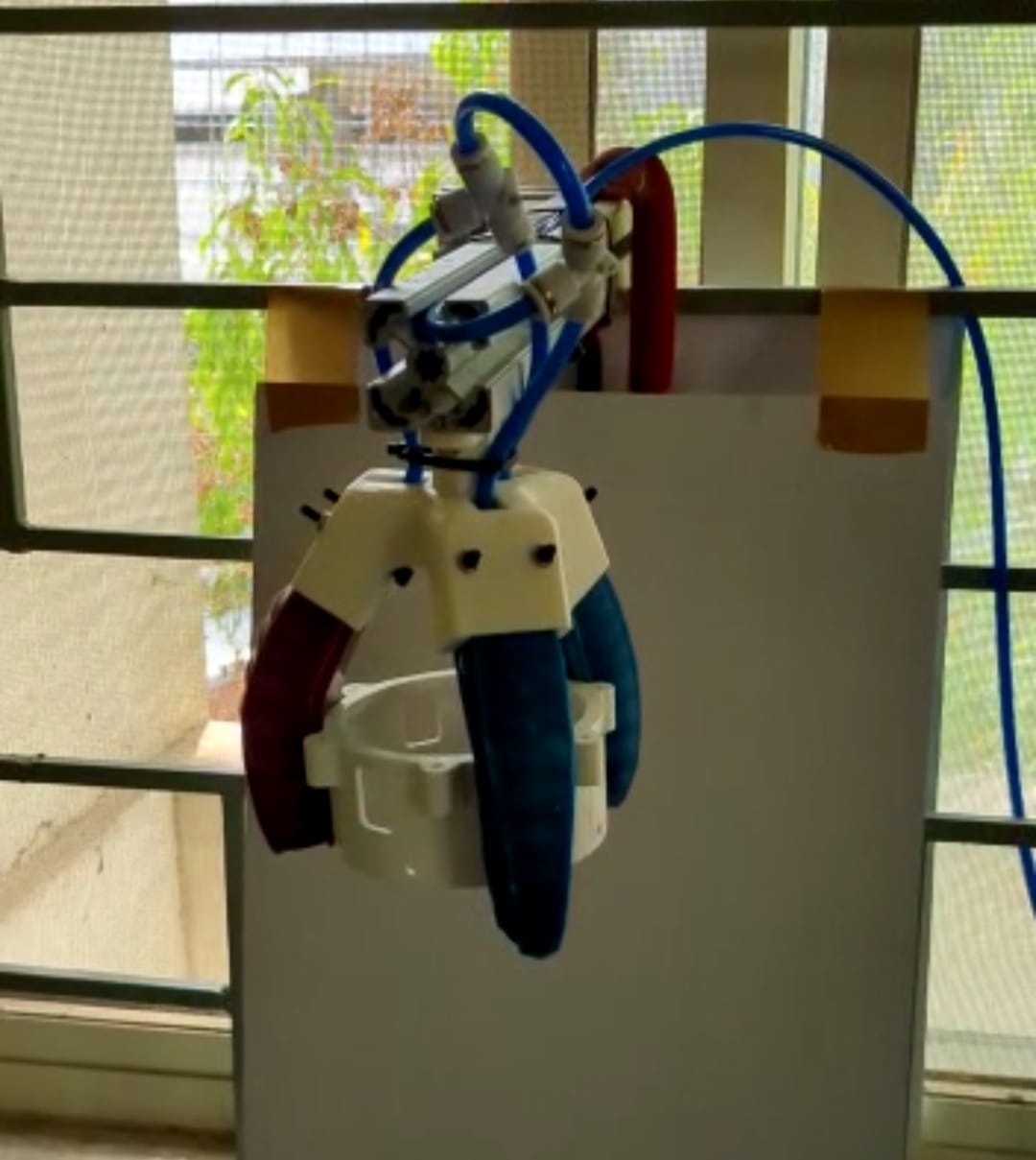
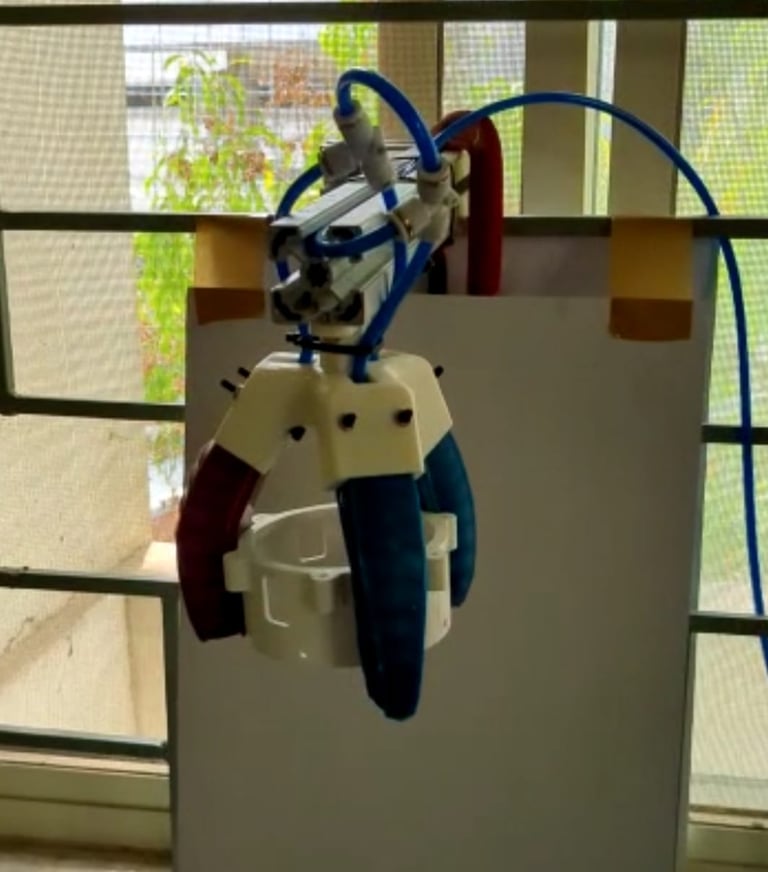
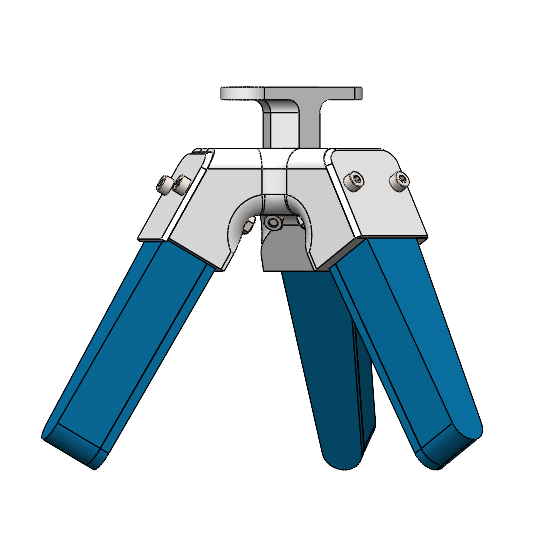
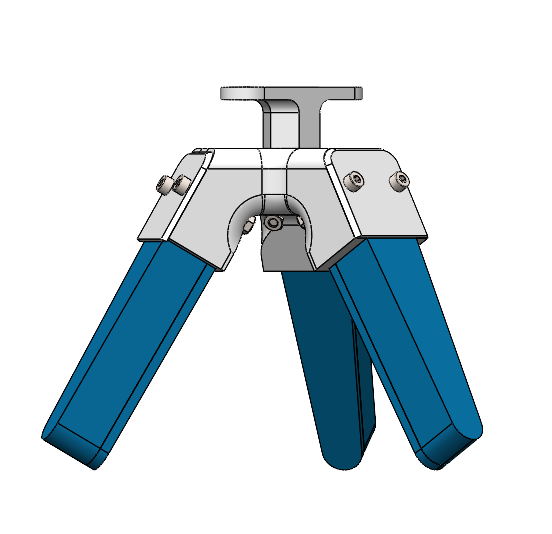
Exemplar Soft gripper developmental process
(Of an early prototype design from March 2023)
Presented at the Universal Robots-APAC conference, Pune, India ©Twara Robotics (LinkedIn source🔗)


The TGrip-1 Datasheet and TGrip-2 Datasheet can be found below.
(Version release: July 2024)
As of January 2024, the TGrip-2 has an upgraded service life of 1.2 million cycles. Further testing is Ongoing.



Automated Mobile Robot (AMR)
Designed and manufactured two low-cost AMR variants using mechatronics design, CAD-CAM, sheet metal bending, wire harnessing, and soldering, with a 750W 1-tonne powertrain, the AMR-75.